RESEARCH
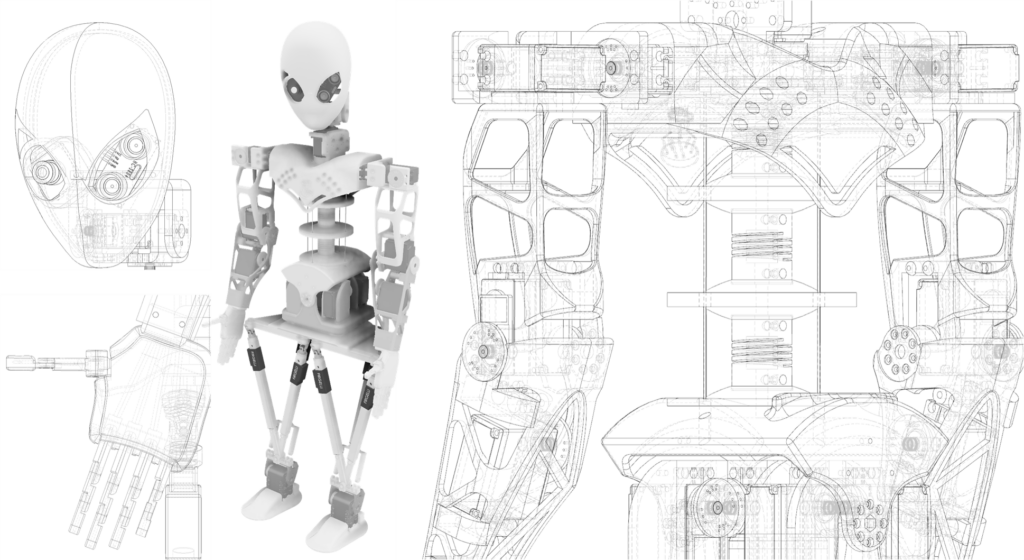
Our research activities focus on the mechanical design and analysis of robots and other mechatronic systems. Our main applications are low-cost service robots, ranging from rehabilitation exoskeletons and motion sensing systems to humanoid robots and manipulators.
We are also interested in the history of machines and mechanisms, and we analyze and reproduce historical mechanisms, varying from civil and automotive to musical applications.
POSTERS

Please refer to people’s profiles for an updated list of individual publications:
Prof. Marco Ceccarelli:
SCOPUS, Scholar, ResearchGate
Dr Matteo Russo:
SCOPUS, Scholar, ResearchGate
THESES
We are available for supervising thesis projects within the BSc in Engineering Sciences and the MSc in Mechatronics. We offer a range of theoretical and practical activities including (but not limited to) the following topics:
- Design and simulation of mechanisms
- Robot analysis and design
- Experimental demonstration of mechatronic systems
- Medical and rehabilitation robotics
- Parallel and cable-driven robots and mechanisms
- Continuum and soft robots
- History of mechanism and machine science
If you are interested, please contact us via email, including your estimated graduation date (according to missing exams) and a short bio with your skills, previous projects, background, and interests.